info@autoproces.pl
info@autoproces.pl
 +48 14 692 68 40
+48 14 692 68 40
 Sklep
Sklep

Znaleziono: 31 realizacji
Widok mapy
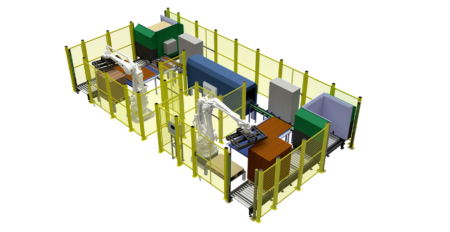
Robotyzacja procesu pakowania w przemyśle farmaceutycznym
Hybrydowa maszyna do produkcji kolan elektrooporowych
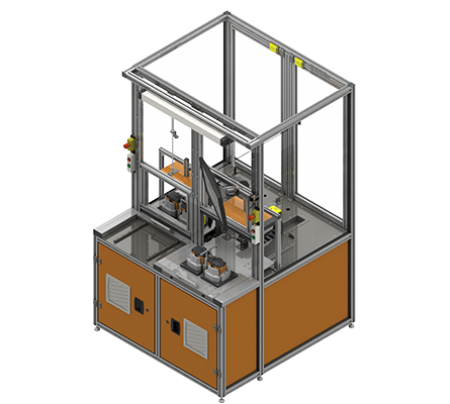
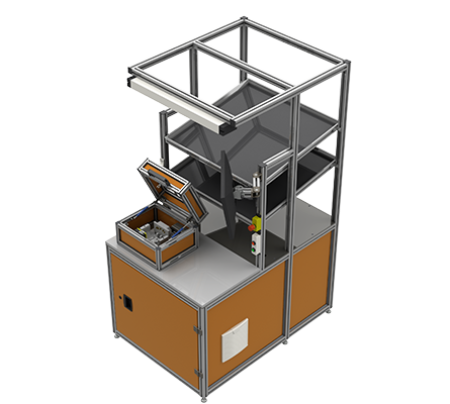
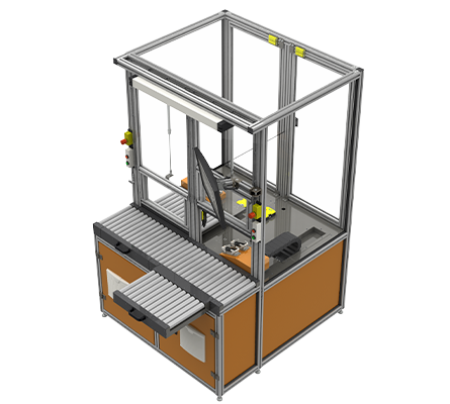
EOL zrobotyzowane stanowisko kontroli
Paletyzacja
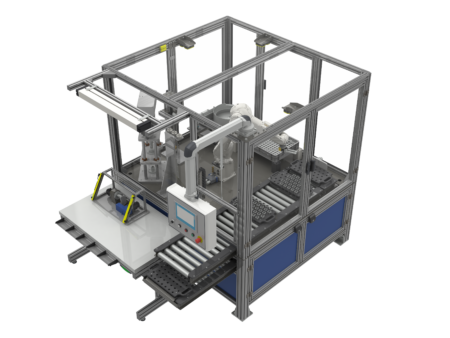
Montaż i test
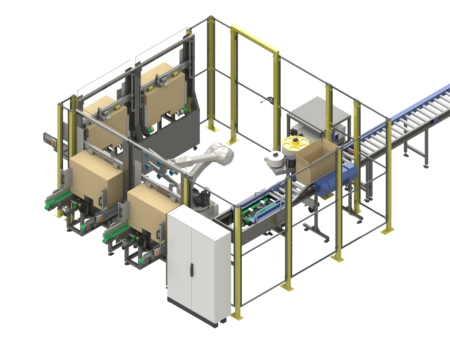
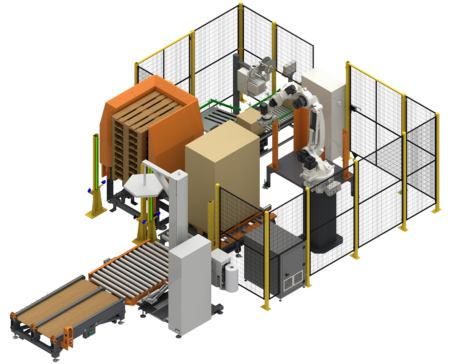
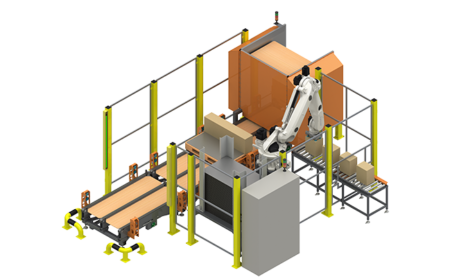
Formowanie kartonów robotem
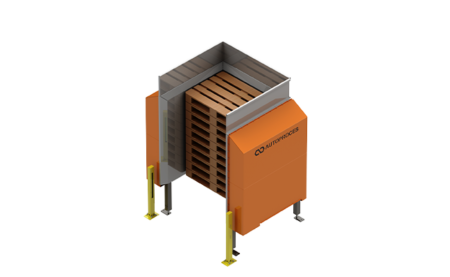
Załadunek warstwy środkowej TAF
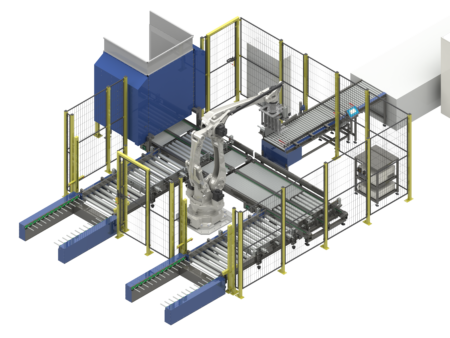
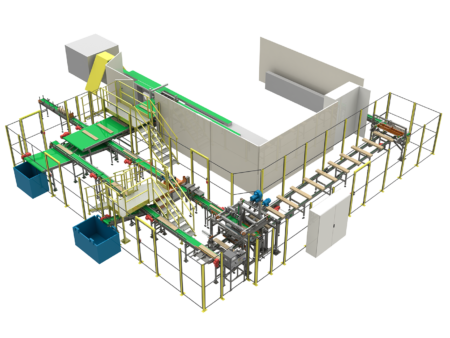
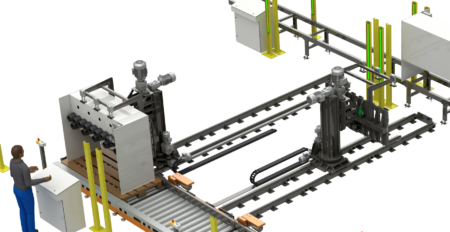
Linia transportu rozdzielnic
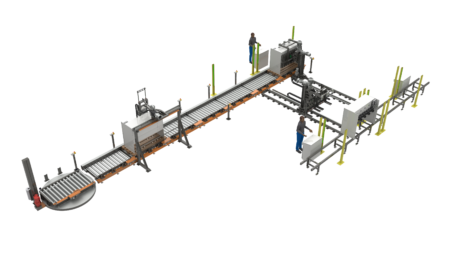
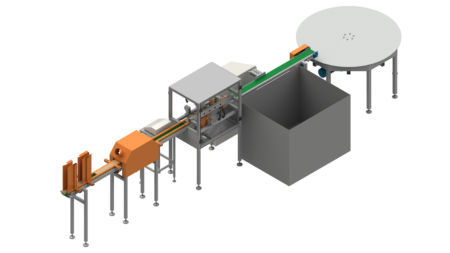
Sortowanie, pakowanie, znakowanie

Pakowanie folii
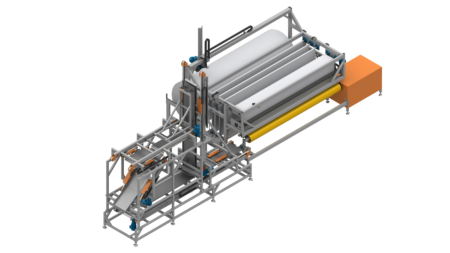
Nawijanie i składanie włókniny
Bramka jakości
Tester EOL baterii BLI 2020
Tester półproduktu HP1P i HP2P
Tester EOL baterii CommonLine
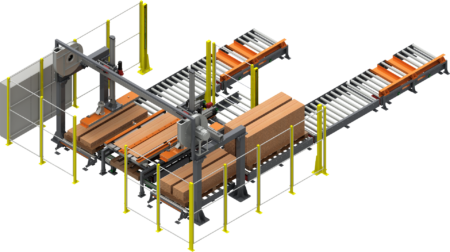
Automatyczna linia do klejenia dwudeski
Linia automatycznego podawania i odbioru
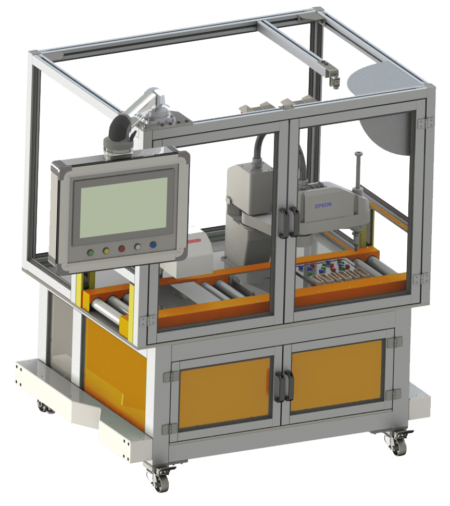
Pomiar i znakowanie
Produkcja filtrów do wody
Transport desek
Manipulatory transportowe
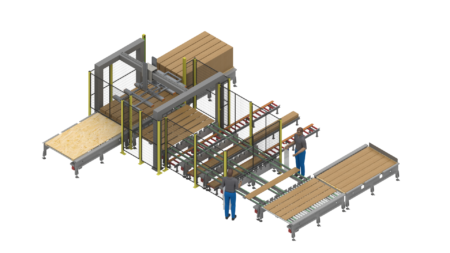
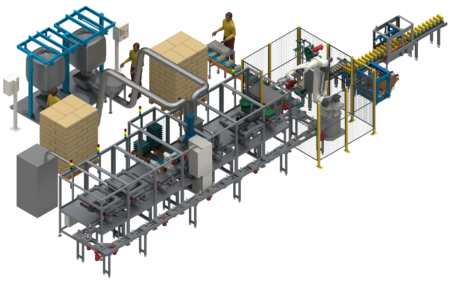
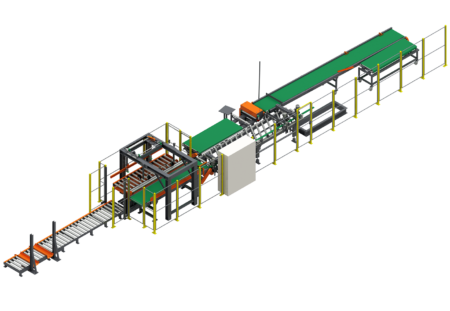
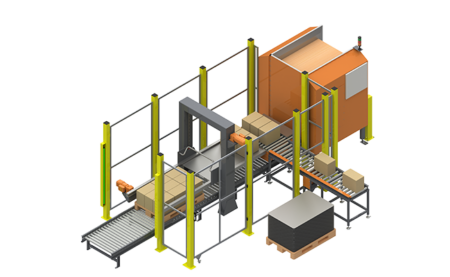
Linia do pakowania i paletyzacji
Linia do transportu i cięcia płyt meblowych
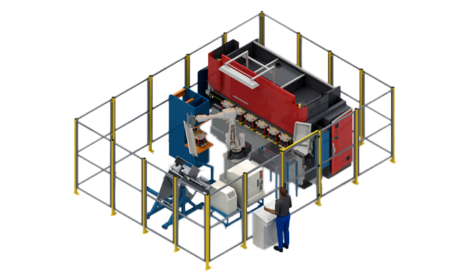
Zrobotyzowana obsługa pras krawędziowych
Paletyzacja i pakowanie blachy modułowej
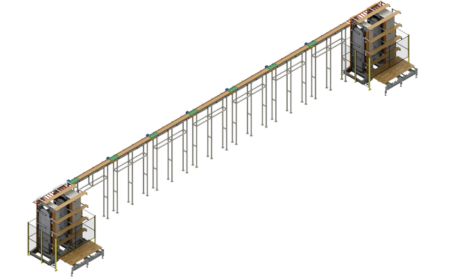
Linia do transportu palet
Paletyzacja i pakowanie rynien i rur spustowych
System transportowy akumulatorów do wanien
Zrobotyzowana paletyzacja
Paletyzery
Elementy wyposażenia linii
W naszych realizacjach stosujemy następujące normy zharmonizowane i inne specyfikacje techniczne:
- PN-EN ISO 12100:2012 „Bezpieczeństwo Maszyn. Ogólne zasady projektowania. Ocena ryzyka i zmniejszanie ryzyka.”
- PN-EN 14118 Bezpieczeństwo maszyn. Zapobieganie niespodziewanemu uruchomieniu.
- PN-EN ISO 13857:2010 Bezpieczeństwo maszyn. Odległości bezpieczeństwa uniemożliwiające sięganie kończynami górnymi i dolnymi do stref niebezpiecznych.
- PN-EN ISO 14120:2016 Bezpieczeństwo maszyn. Osłony. Ogólne wymagania dotyczące projektowania i budowy osłon stałych i ruchomych
- PN-EN 13849-1:2016 Bezpieczeństwo maszyn. Elementy systemów sterowania związane z bezpieczeństwem. Część 1: Ogólne zasady projektowania.
- PN-EN 60204-1:2010 Bezpieczeństwo maszyn. Wyposażenie elektryczne maszyn. Część 1: Wymagania ogólne.
- PN-EN ISO 13850:2016 Bezpieczeństwo maszyn. Funkcja zatrzymania awaryjnego. Zasady projektowania.
- PN-EN 62061:2008/A1:2013-06 „Bezpieczeństwo maszyn. Bezpieczeństwo funkcjonalne elektrycznych, elektronicznych i elektronicznych programowalnych systemów sterowania związanych z bezpieczeństwem”
- PN-EN ISO 10218-1:2011 Roboty i urządzenia dla robotyki — Wymagania bezpieczeństwa dla robotów przemysłowych — Część 1: Roboty
- PN-EN ISO 10218-2:2011 Roboty i urządzenia dla robotyki — Wymagania bezpieczeństwa dla robotów przemysłowych — Część 2: System robotowy i integracja
Przy tworzeniu projektów spełniamy wymagania obowiązujących Dyrektyw Unijnych:
- Dyrektywy Maszynowej 2006/42/WE (Rozporządzeniem Ministra Gospodarki z dnia 21 października 2008 r. w sprawie zasadniczych wymagań dla maszyn (Dz. U. z 2008 r. nr 199 poz. 1228).
- Dyrektywy Kompatybilności Elektromagnetycznej 2014/30/WE (Ustawą z dnia 13 kwietnia 2007 r. o kompatybilności elektromagnetycznej (Dz. U Nr 82, poz. 556 ze zmianami z 2010 r. Nr 107, poz. 679).
- Dyrektywy Niskonapięciowej 2006/95/WE (Rozporządzeniem Ministra Gospodarki 21 sierpnia 2007 r. w sprawie zasadniczych wymagań dla sprzętu elektrycznego (Dz. U. Nr 155, poz. 1089).